#include <AStarSearch.h>
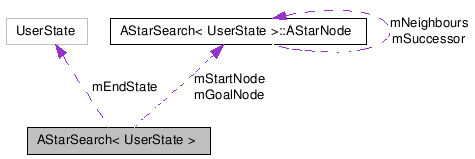
Collaboration diagram for AStarSearch< UserState >:
Public Types | |
| SS_NOT_STARTED | |
| SS_RUNNING | |
| SS_PATH_NOT_FOUND | |
| SS_PATH_FOUND | |
| enum | SearchState { SS_NOT_STARTED, SS_RUNNING, SS_PATH_NOT_FOUND, SS_PATH_FOUND } |
Public Member Functions | |
| AStarSearch (void) | |
| ~AStarSearch (void) | |
| void | _releaseSolution () |
| void | setStartState (UserState *startState, UserState *endState) |
| SearchState | getSearchState () |
| bool | isRunnable () |
| Returns true if the search can be advanced at least one more step. | |
| bool | isSolved () |
| Returns true iff the search produced a valid result. | |
| bool | isUnsolvable () |
| Returns true iff the search cannot find a valid result. | |
| bool | advanceSearch () |
| Advances to the next best node. | |
| const WaypointList< UserState > * | getSolutionPath () |
Private Member Functions | |
| AStarNode * | _findBestOpenNode () |
| Retrieves the node on the Open List with the smallest total cost to reach the goal node. | |
| AStarNode * | _getFromClosed (AStarNode *node) |
| AStarNode * | _getFromOpen (AStarNode *node) |
| bool | _isNodeClosed (AStarNode *node) |
| bool | _isNodeOpen (AStarNode *node) |
| void | _removeFromClosed (AStarNode *node) |
| void | _removeFromOpen (AStarNode *node) |
| void | _addToOpen (AStarNode *node) |
| void | _addToClosed (AStarNode *node) |
| void | _constructionWaypointList (AStarNode *endNode) |
| Builds a WaypointList from UserStates. | |
| void | _releaseNodes () |
Private Attributes | |
| SearchState | mCurState |
| AStarNode * | mStartNode |
| UserState * | mEndState |
| AStarNode * | mGoalNode |
| vector< AStarNode * > | mOpenList |
| vector< AStarNode * > | mClosedList |
| WaypointList< UserState > * | mSolutionList |
Classes | |
| class | AStarNode |
| class | HeapCompare |
Definition at line 51 of file AStarSearch.h.
| enum AStarSearch::SearchState |
Definition at line 192 of file AStarSearch.h.
00193 { 00194 SS_NOT_STARTED, 00195 SS_RUNNING, 00196 SS_PATH_NOT_FOUND, 00197 SS_PATH_FOUND 00198 };
| AStarSearch< UserState >::AStarSearch | ( | void | ) | [inline] |
Definition at line 233 of file AStarSearch.h.
References AStarSearch< UserState >::mClosedList, AStarSearch< UserState >::mCurState, AStarSearch< UserState >::mGoalNode, AStarSearch< UserState >::mOpenList, AStarSearch< UserState >::mSolutionList, AStarSearch< UserState >::mStartNode, and AStarSearch< UserState >::SS_NOT_STARTED.
00234 { 00235 mCurState = SS_NOT_STARTED; 00236 00237 mGoalNode = NULL; 00238 mStartNode = NULL; 00239 00240 mSolutionList = NULL; 00241 00242 mOpenList.clear (); 00243 mClosedList.clear (); 00244 }
| AStarSearch< UserState >::~AStarSearch | ( | void | ) | [inline] |
Definition at line 247 of file AStarSearch.h.
References AStarSearch< UserState >::_releaseNodes(), and AStarSearch< UserState >::_releaseSolution().
00248 { 00249 _releaseNodes (); 00250 _releaseSolution (); 00251 }
| void AStarSearch< UserState >::_addToClosed | ( | AStarNode * | node | ) | [inline, private] |
Definition at line 599 of file AStarSearch.h.
References AStarSearch< UserState >::mClosedList.
Referenced by AStarSearch< UserState >::advanceSearch().
00600 { 00601 mClosedList.push_back ( node ); 00602 }
| void AStarSearch< UserState >::_addToOpen | ( | AStarNode * | node | ) | [inline, private] |
Definition at line 590 of file AStarSearch.h.
References AStarSearch< UserState >::mOpenList.
Referenced by AStarSearch< UserState >::advanceSearch().
00591 { 00592 mOpenList.push_back ( node ); 00593 #ifdef _USE_HEAP_ 00594 push_heap ( mOpenList.begin(), mOpenList.end(), HeapCompare() ); 00595 #endif 00596 }
| void AStarSearch< UserState >::_constructionWaypointList | ( | AStarNode * | endNode | ) | [inline, private] |
Builds a WaypointList from UserStates.
The last UserState in the list will be the one associated with endNode. Each successor of endNode will have it's UserState added to the beginning of the list. Therefore, this method builds a list in reverse order from endNode to some startNode who's successor is NULL.
Definition at line 618 of file AStarSearch.h.
References AStarSearch< UserState >::mSolutionList.
Referenced by AStarSearch< UserState >::advanceSearch().
00619 { 00620 mSolutionList = new WaypointList<UserState>(); 00621 00622 AStarNode* curNode = endNode; 00623 while ( curNode != NULL ) 00624 { 00625 mSolutionList->addWaypointToFront ( curNode->mUserState ); 00626 curNode = curNode->mSuccessor; 00627 } 00628 }
| AStarNode* AStarSearch< UserState >::_findBestOpenNode | ( | ) | [inline, private] |
Retrieves the node on the Open List with the smallest total cost to reach the goal node.
This is a combination of the entry cost as well as the estimated cost to goal.
Definition at line 443 of file AStarSearch.h.
References AStarSearch< UserState >::AStarNode::getEntryCost(), AStarSearch< UserState >::AStarNode::getEstimatedGoalCost(), AStarSearch< UserState >::AStarNode::getTotalCost(), and AStarSearch< UserState >::mOpenList.
Referenced by AStarSearch< UserState >::advanceSearch().
00444 { 00445 if ( mOpenList.empty () ) 00446 throw exception ( "AStarSearch::_findBestOpenNode - empty open list" ); 00447 00448 00449 #ifdef _USE_HEAP_ 00450 AStarNode* bestNode = mOpenList.front(); 00451 pop_heap ( mOpenList.begin(), mOpenList.end(), HeapCompare() ); 00452 mOpenList.pop_back(); 00453 #else 00454 // Search the list backwards until we implement a priority heap 00455 AStarNode* bestNode = mOpenList.front (); 00456 float bestCost = bestNode->getTotalCost (); 00457 00458 vector<AStarNode*>::iterator bestNodeIter = mOpenList.begin(); 00459 vector<AStarNode*>::iterator iter = mOpenList.begin (); 00460 00461 while ( iter != mOpenList.end () ) 00462 { 00463 if ( (*iter)->getTotalCost() < bestCost ) 00464 { 00465 bestNode = (*iter); 00466 bestCost = bestNode->getTotalCost(); 00467 bestNodeIter = iter; 00468 } 00469 00470 iter++; 00471 } 00472 00473 if ( bestNodeIter != mOpenList.end() ) 00474 { 00475 mOpenList.erase ( bestNodeIter ); 00476 } 00477 #endif 00478 00479 #if _DEBUG 00480 //cout << "Best Open Node: (" << bestNode->mUserState->mX << ", " << bestNode->mUserState->mY << ")" << endl; 00481 cout << "\tEntry Cost: " << bestNode->getEntryCost () << endl; 00482 cout << "\tGoal Cost: " << bestNode->getEstimatedGoalCost () << endl; 00483 #endif 00484 00485 return bestNode; 00486 }
| AStarNode* AStarSearch< UserState >::_getFromClosed | ( | AStarNode * | node | ) | [inline, private] |
Definition at line 491 of file AStarSearch.h.
References AStarSearch< UserState >::mClosedList.
Referenced by AStarSearch< UserState >::advanceSearch().
00492 { 00493 vector<AStarNode*>::iterator iter = mClosedList.begin (); 00494 while ( iter != mClosedList.end () ) 00495 { 00496 if ( *(*iter) == (*node) ) 00497 return *iter; 00498 00499 iter++; 00500 } 00501 00502 return NULL; 00503 }
| AStarNode* AStarSearch< UserState >::_getFromOpen | ( | AStarNode * | node | ) | [inline, private] |
Definition at line 507 of file AStarSearch.h.
References AStarSearch< UserState >::mOpenList.
Referenced by AStarSearch< UserState >::advanceSearch().
00508 { 00509 vector<AStarNode*>::iterator iter = mOpenList.begin (); 00510 while ( iter != mOpenList.end () ) 00511 { 00512 if ( *(*iter) == (*node) ) 00513 return *iter; 00514 00515 iter++; 00516 } 00517 00518 return NULL; 00519 }
| bool AStarSearch< UserState >::_isNodeClosed | ( | AStarNode * | node | ) | [inline, private] |
Definition at line 523 of file AStarSearch.h.
References AStarSearch< UserState >::mClosedList.
00524 { 00525 vector<AStarNode*>::iterator iter = mClosedList.begin (); 00526 while ( iter != mClosedList.end () ) 00527 { 00528 if ( *(*iter) == (*node) ) 00529 return true; 00530 00531 iter++; 00532 } 00533 return false; 00534 }
| bool AStarSearch< UserState >::_isNodeOpen | ( | AStarNode * | node | ) | [inline, private] |
Definition at line 537 of file AStarSearch.h.
References AStarSearch< UserState >::mClosedList.
00538 { 00539 vector<AStarNode*>::iterator iter = mClosedList.begin (); 00540 while ( iter != mClosedList.end () ) 00541 { 00542 if ( *(*iter) == (*node) ) 00543 return true; 00544 00545 iter++; 00546 } 00547 return false; 00548 }
| void AStarSearch< UserState >::_releaseNodes | ( | ) | [inline, private] |
Definition at line 631 of file AStarSearch.h.
References AStarSearch< UserState >::mStartNode.
Referenced by AStarSearch< UserState >::advanceSearch(), AStarSearch< UserState >::setStartState(), and AStarSearch< UserState >::~AStarSearch().
00632 { 00633 // All nodes in the search are part of a connected tree with 00634 // mStartNode as the root 00635 delete mStartNode; 00636 mStartNode = NULL; 00637 }
| void AStarSearch< UserState >::_releaseSolution | ( | ) | [inline] |
Definition at line 255 of file AStarSearch.h.
References AStarSearch< UserState >::mSolutionList.
Referenced by AStarSearch< UserState >::setStartState(), and AStarSearch< UserState >::~AStarSearch().
00256 { 00257 delete mSolutionList; 00258 mSolutionList = NULL; 00259 }
| void AStarSearch< UserState >::_removeFromClosed | ( | AStarNode * | node | ) | [inline, private] |
Definition at line 551 of file AStarSearch.h.
References AStarSearch< UserState >::mClosedList.
Referenced by AStarSearch< UserState >::advanceSearch().
00552 { 00553 vector<AStarNode*>::iterator iter = mClosedList.begin (); 00554 while ( iter != mClosedList.end () ) 00555 { 00556 if ( *(*iter) == (*node) ) 00557 { 00558 mClosedList.erase ( iter ); 00559 return; 00560 } 00561 00562 iter++; 00563 } 00564 00565 throw exception ( "AStarSearch::_removeFromClosed - Node not found" ); 00566 }
| void AStarSearch< UserState >::_removeFromOpen | ( | AStarNode * | node | ) | [inline, private] |
Definition at line 569 of file AStarSearch.h.
References AStarSearch< UserState >::mOpenList.
Referenced by AStarSearch< UserState >::advanceSearch().
00570 { 00571 vector<AStarNode*>::iterator iter = mOpenList.begin (); 00572 while ( iter != mOpenList.end () ) 00573 { 00574 if ( *(*iter) == (*node) ) 00575 { 00576 mOpenList.erase ( iter ); 00577 #ifdef _USE_HEAP_ 00578 make_heap ( mOpenList.begin(), mOpenList.end(), HeapCompare() ); 00579 #endif 00580 return; 00581 } 00582 00583 iter++; 00584 } 00585 00586 throw exception ( "AStarSearch::_removeFromOpen - Node not found" ); 00587 }
| bool AStarSearch< UserState >::advanceSearch | ( | ) | [inline] |
Advances to the next best node.
Definition at line 326 of file AStarSearch.h.
References AStarSearch< UserState >::_addToClosed(), AStarSearch< UserState >::_addToOpen(), AStarSearch< UserState >::_constructionWaypointList(), AStarSearch< UserState >::_findBestOpenNode(), AStarSearch< UserState >::_getFromClosed(), AStarSearch< UserState >::_getFromOpen(), AStarSearch< UserState >::_releaseNodes(), AStarSearch< UserState >::_removeFromClosed(), AStarSearch< UserState >::_removeFromOpen(), AStarSearch< UserState >::AStarNode::getEntryCost(), AStarSearch< UserState >::AStarNode::getNeighbour(), AStarSearch< UserState >::mCurState, AStarSearch< UserState >::mEndState, AStarSearch< UserState >::mOpenList, AStarSearch< UserState >::AStarNode::mUserState, AStarSearch< UserState >::SS_NOT_STARTED, AStarSearch< UserState >::SS_PATH_FOUND, AStarSearch< UserState >::SS_PATH_NOT_FOUND, and AStarSearch< UserState >::SS_RUNNING.
Referenced by AStarSearchManager< ASR::Level::LevelNode >::_advanceSearch().
00327 { 00328 if ( mCurState == SS_NOT_STARTED ) 00329 mCurState = SS_RUNNING; 00330 00331 if ( mCurState != SS_RUNNING ) 00332 throw exception ( "AStarSearch::singleStep - Search not in a runnable state" ); 00333 00334 // We couldn't find a path 00335 if ( mOpenList.empty () ) 00336 { 00337 mCurState = SS_PATH_NOT_FOUND; 00338 } 00339 00340 00341 // Grab a node from the Open list 00342 AStarNode* curNode = _findBestOpenNode (); 00343 00344 // We've reached the goal node so build our path 00345 if ( curNode->mUserState->isNode ( *mEndState ) ) 00346 { 00347 mCurState = SS_PATH_FOUND; 00348 _constructionWaypointList ( curNode ); 00349 _releaseNodes (); 00350 return true; 00351 } 00352 00353 // Check all the neighbours for better matches and update any we find 00354 for ( int i = 0; i < curNode->mUserState->getNumNeighbours(); i++ ) 00355 { 00356 AStarNode* neighbour = curNode->getNeighbour ( i ); 00357 if ( neighbour == NULL ) 00358 continue; 00359 00360 // This neighbour is inpassable 00361 if ( fabs( neighbour->getTraversalCost () + 1.0f ) < 0.01f ) 00362 continue; 00363 00364 // Determine if the node is on the closed list 00365 AStarNode* closedNode = _getFromClosed ( neighbour ); 00366 if ( closedNode ) 00367 { 00368 // If a node was already on the closed list, then it has been 00369 // explored and has had it's neighbours explored. We may 00370 // have a better way "in to" the node so consider it again 00371 // with the new information 00372 float newEntryCost = curNode->getEntryCost() + neighbour->getTraversalCost(); 00373 if ( newEntryCost < closedNode->getEntryCost() ) 00374 { 00375 // Update the neighbour to use the current node as the entry point 00376 neighbour->setSuccessor ( curNode ); 00377 neighbour->setEntryCost ( newEntryCost ); 00378 00379 // We need to re-examine this node 00380 _removeFromClosed ( closedNode ); 00381 _addToOpen ( neighbour ); 00382 } 00383 continue; 00384 } 00385 00386 // The node was set to be explored but we have found a better way in 00387 // so consider this way into the node 00388 AStarNode* openNode = _getFromOpen ( neighbour ); 00389 if ( openNode ) 00390 { 00391 // If a node was already on the open list, it's estimated cost 00392 // to the goal has already been set 00393 00394 float newEntryCost = curNode->getEntryCost() + neighbour->getTraversalCost(); 00395 if ( newEntryCost < neighbour->getEntryCost() ) 00396 { 00397 // Update the neighbour to use the current node as the entry point 00398 neighbour->setSuccessor ( curNode ); 00399 neighbour->setEntryCost ( newEntryCost ); 00400 00401 _removeFromOpen ( openNode ); 00402 _addToOpen ( neighbour ); 00403 } 00404 continue; 00405 } 00406 00407 // The neighbour state hasn't been considered before 00408 // so set it up and add it to the open list for consideration 00409 else 00410 { 00411 neighbour->setSuccessor ( curNode ); 00412 neighbour->setEntryCost ( curNode->getEntryCost() + neighbour->getTraversalCost () ); 00413 neighbour->setEstimatedGoalCost( neighbour->mUserState->getEstimatedCostToState( *mEndState )); 00414 neighbour->createNeighbourNodes (); 00415 _addToOpen ( neighbour ); 00416 } 00417 } 00418 00419 _addToClosed ( curNode ); 00420 00421 return false; 00422 }
| SearchState AStarSearch< UserState >::getSearchState | ( | ) | [inline] |
Definition at line 292 of file AStarSearch.h.
References AStarSearch< UserState >::mCurState.
00293 { 00294 return mCurState; 00295 }
| const WaypointList<UserState>* AStarSearch< UserState >::getSolutionPath | ( | ) | [inline] |
Definition at line 425 of file AStarSearch.h.
References AStarSearch< UserState >::mSolutionList.
00426 { 00427 if ( !mSolutionList ) 00428 throw exception ( "AStarSearch::getSolutionPath - No solution exists" ); 00429 00430 return mSolutionList; 00431 }
| bool AStarSearch< UserState >::isRunnable | ( | ) | [inline] |
Returns true if the search can be advanced at least one more step.
Definition at line 300 of file AStarSearch.h.
References AStarSearch< UserState >::mCurState, AStarSearch< UserState >::SS_NOT_STARTED, and AStarSearch< UserState >::SS_RUNNING.
Referenced by AStarSearchManager< ASR::Level::LevelNode >::_advanceSearch().
00301 { 00302 return (mCurState == SS_RUNNING || mCurState == SS_NOT_STARTED ); 00303 }
| bool AStarSearch< UserState >::isSolved | ( | ) | [inline] |
Returns true iff the search produced a valid result.
Definition at line 308 of file AStarSearch.h.
References AStarSearch< UserState >::mCurState, and AStarSearch< UserState >::SS_PATH_FOUND.
00309 { 00310 return (mCurState == SS_PATH_FOUND ); 00311 }
| bool AStarSearch< UserState >::isUnsolvable | ( | ) | [inline] |
Returns true iff the search cannot find a valid result.
Definition at line 317 of file AStarSearch.h.
References AStarSearch< UserState >::mCurState, and AStarSearch< UserState >::SS_PATH_NOT_FOUND.
00318 { 00319 return (mCurState == SS_PATH_NOT_FOUND ); 00320 }
| void AStarSearch< UserState >::setStartState | ( | UserState * | startState, | |
| UserState * | endState | |||
| ) | [inline] |
Definition at line 265 of file AStarSearch.h.
References AStarSearch< UserState >::_releaseNodes(), AStarSearch< UserState >::_releaseSolution(), AStarSearch< UserState >::AStarNode::createNeighbourNodes(), AStarSearch< UserState >::mCurState, AStarSearch< UserState >::mEndState, AStarSearch< UserState >::mOpenList, AStarSearch< UserState >::mStartNode, AStarSearch< UserState >::AStarNode::mUserState, AStarSearch< UserState >::AStarNode::setEstimatedGoalCost(), and AStarSearch< UserState >::SS_PATH_NOT_FOUND.
Referenced by AStarSearchManager< ASR::Level::LevelNode >::createSearch().
00266 { 00267 _releaseNodes (); 00268 _releaseSolution (); 00269 00270 mStartNode = NULL; 00271 mEndState = NULL; 00272 00273 if ( fabs(endState->getTraversalCost() + 1.0f) < 0.01f ) 00274 { 00275 mCurState = SS_PATH_NOT_FOUND; 00276 return; 00277 } 00278 00279 mStartNode = new AStarNode ( startState ); 00280 mStartNode->createNeighbourNodes (); 00281 mStartNode->setEstimatedGoalCost ( mStartNode->mUserState->getEstimatedCostToState ( *endState ) ); 00282 00283 mEndState = endState; 00284 00285 mOpenList.push_back ( mStartNode ); 00286 }
vector<AStarNode*> AStarSearch< UserState >::mClosedList [private] |
Definition at line 208 of file AStarSearch.h.
Referenced by AStarSearch< UserState >::_addToClosed(), AStarSearch< UserState >::_getFromClosed(), AStarSearch< UserState >::_isNodeClosed(), AStarSearch< UserState >::_isNodeOpen(), AStarSearch< UserState >::_removeFromClosed(), and AStarSearch< UserState >::AStarSearch().
SearchState AStarSearch< UserState >::mCurState [private] |
Definition at line 201 of file AStarSearch.h.
Referenced by AStarSearch< UserState >::advanceSearch(), AStarSearch< UserState >::AStarSearch(), AStarSearch< UserState >::getSearchState(), AStarSearch< UserState >::isRunnable(), AStarSearch< UserState >::isSolved(), AStarSearch< UserState >::isUnsolvable(), and AStarSearch< UserState >::setStartState().
UserState* AStarSearch< UserState >::mEndState [private] |
Definition at line 203 of file AStarSearch.h.
Referenced by AStarSearch< UserState >::advanceSearch(), and AStarSearch< UserState >::setStartState().
AStarNode* AStarSearch< UserState >::mGoalNode [private] |
Definition at line 205 of file AStarSearch.h.
Referenced by AStarSearch< UserState >::AStarSearch().
vector<AStarNode*> AStarSearch< UserState >::mOpenList [private] |
Definition at line 207 of file AStarSearch.h.
Referenced by AStarSearch< UserState >::_addToOpen(), AStarSearch< UserState >::_findBestOpenNode(), AStarSearch< UserState >::_getFromOpen(), AStarSearch< UserState >::_removeFromOpen(), AStarSearch< UserState >::advanceSearch(), AStarSearch< UserState >::AStarSearch(), and AStarSearch< UserState >::setStartState().
WaypointList<UserState>* AStarSearch< UserState >::mSolutionList [private] |
Definition at line 210 of file AStarSearch.h.
Referenced by AStarSearch< UserState >::_constructionWaypointList(), AStarSearch< UserState >::_releaseSolution(), AStarSearch< UserState >::AStarSearch(), and AStarSearch< UserState >::getSolutionPath().
AStarNode* AStarSearch< UserState >::mStartNode [private] |
Definition at line 202 of file AStarSearch.h.
Referenced by AStarSearch< UserState >::_releaseNodes(), AStarSearch< UserState >::AStarSearch(), and AStarSearch< UserState >::setStartState().
 1.4.7
1.4.7